
论文名称:VOLO: Vision Outlooker for Visual Recognition
作者:Li Yuan, Qibin Hou, Zihang Jiang, Jiashi Feng, Shuicheng Yan
摘要
- 视觉识别任务已被主宰多年。基于自注意力的在分类方面表现出了极大的潜力,在没有额外数据前提下,的性能与最先进的模型仍具有差距。在这项工作中,我们的目标是缩小这两者之间的性能差距,并且证明了基于注意力的模型确实能够比表现更好。
- 与此同时,我们发现限制在分类中的性能的主要因素是其在将细粒度级别的特征编码乘表示过程中比较低效,为了解决这个问题,我们引入了一种新的注意力,并提出了一个简单而通用的架构,称为 ()。注意力主要将-级别的特征和上下文信息更高效地编码到表示中,这些对识别性能至关重要,但往往被自注意力所忽视。
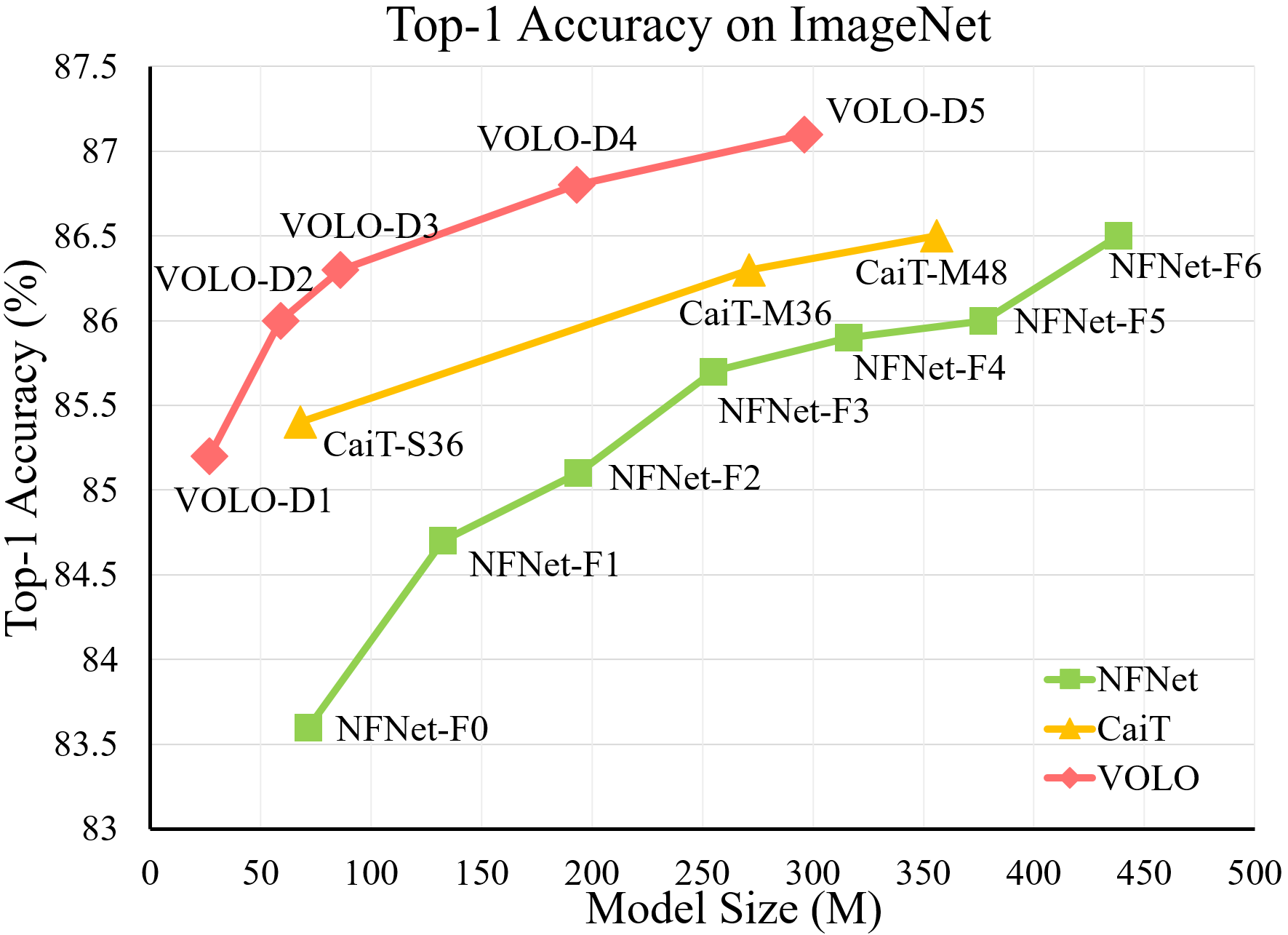
- 实验表明,在不使用任何额外训练数据的情况下,在-分类任务上达到了87.1%的-准确率,这是第一个超过87%的模型。此外,预训练好的VOLO模型还可以很好地迁移到下游任务,如语义分割。我们在验证集上获得了84.3% ,在验证集上获得了54.3%的,均创下了最新记录。
总结:本文提出了一种新型的注意力机制——,与粗略建模全局长距离关系的不同,能在邻域上更精细地编码领域特征,弥补了对更精细特征编码的不足。
OutLooker Attention
OutLooker模块可视作拥有两个独立阶段的结构,第一个部分包含一堆用于生成精细化的表示( ),第二个部分部署一系列的转换器来聚合全局信息。在每个部分之前,都有块嵌入模块( )将输入映射到指定形状。
理论和形式
OutLooker的提出主要基于以下两点:
- 每个空间位置的特征都具有足够的代表性,可以生成聚集了局部邻近信息的注意力权重
- 密集的局部空间聚合信息可以有效地编码精细层次的信息
OutLooker由用于空间信息编码的outlook注意层和用于通道信息交互的MLP组成,给定,有一下形式:
其中表示d
方法

从上图我们可以很容易得到,整个过程分为两条路线,接下来先介绍第一条

Outlook Attention Generation:
- 通过全连接层将的通道由变为,得到
- 通过将注意力权重变为,表示每个像素生成的权重
- 在最后一维使用,这里可以看出为什么通道数变为,因为其需要为大小的窗口里所有的像素建立相互关系,也就是说,这可以看作是一种局部的,这也是与等类似工作的一个巨大不同之处;这里的就是对每一个像素计算与其他所有像素(包括自己)的一个相似度
Dense aggregation(Value Generation):
- 首先使用全连接层进行一次线性变换,通道数不改变
- 使用
nn.Unfold()进行展开,维度为,得到
Calculate The Attention:
- 两条路线得到的矩阵进行矩阵乘积,相当进行了一次卷积操作,卷积核为
- 使用
nn.Fold折叠回原尺寸
整个过程的代码如下所示:

class OutlookAttention(nn.Module):
"""
Implementation of outlook attention
--dim: hidden dim
--num_heads: number of heads
--kernel_size: kernel size in each window for outlook attention
return: token features after outlook attention
"""
def __init__(self, dim, num_heads, kernel_size=3, padding=1, stride=1,
qkv_bias=False, qk_scale=None, attn_drop=0., proj_drop=0.):
super().__init__()
head_dim = dim // num_heads
self.num_heads = num_heads
self.kernel_size = kernel_size
self.padding = padding
self.stride = stride
self.scale = qk_scale or head_dim**-0.5
self.v = nn.Linear(dim, dim, bias=qkv_bias)
self.attn = nn.Linear(dim, kernel_size**4 * num_heads)
self.attn_drop = nn.Dropout(attn_drop)
self.proj = nn.Linear(dim, dim)
self.proj_drop = nn.Dropout(proj_drop)
self.unfold = nn.Unfold(kernel_size=kernel_size, padding=padding, stride=stride)
self.pool = nn.AvgPool2d(kernel_size=stride, stride=stride, ceil_mode=True) # stride的实现可能靠破
def forward(self, x):
B, H, W, C = x.shape
v = self.v(x).permute(0, 3, 1, 2) # B, H, W, C ->B, C, H, w
h, w = math.ceil(H / self.stride), math.ceil(W / self.stride)
v = self.unfold(v).reshape(B, self.num_heads, C // self.num_heads,
self.kernel_size * self.kernel_size,
h * w).permute(0, 1, 4, 3, 2) # B, N, C//N, K*K, H*W->B, N, H*W, K*K, C//N
attn = self.pool(x.permute(0, 3, 1, 2)).permute(0, 2, 3, 1)
attn = self.attn(attn).reshape(
B, h * w, self.num_heads, self.kernel_size * self.kernel_size,
self.kernel_size * self.kernel_size).permute(0, 2, 1, 3, 4) # B,H,N,kxk,kxk
attn = attn * self.scale
attn = attn.softmax(dim=-1)
attn = self.attn_drop(attn)
x = (attn @ v).permute(0, 1, 4, 3, 2).reshape(
B, C * self.kernel_size * self.kernel_size, h * w)
x = F.fold(x, output_size=(H, W), kernel_size=self.kernel_size,
padding=self.padding, stride=self.stride)
x = self.proj(x.permute(0, 2, 3, 1))
x = self.proj_drop(x)
return x
多头机制的实现
多头机制的实现十分简单,假设设置头数为,只需要调整,最后生成个,其中,分别计算最后Concat起来
Patch Embedding
Patch Embedding最初应该是源于ViT,类似于池化,通过卷积的线性变换将特征图中的一小块(patch)进行映射,最终实现一种下采样的效果
不同与池化的粗暴,Patch Embedding能一定程度上保留信息,扩大感受野
同时,可以减少后续模块的计算量
其实现方法通过控制卷积核大小和步长来实现,VOLO实现的代码如下
class PatchEmbed(nn.Module):
"""
Image to Patch Embedding.
Different with ViT use 1 conv layer, we use 4 conv layers to do patch embedding
"""
def __init__(self, img_size=224, stem_conv=False, stem_stride=1,
patch_size=8, in_chans=3, hidden_dim=64, embed_dim=384):
super().__init__()
assert patch_size in [4, 8, 16]
self.stem_conv = stem_conv
if stem_conv:
self.conv = nn.Sequential(
nn.Conv2d(in_chans, hidden_dim, kernel_size=7, stride=stem_stride,
padding=3, bias=False), # 112x112
nn.BatchNorm2d(hidden_dim),
nn.ReLU(inplace=True),
nn.Conv2d(hidden_dim, hidden_dim, kernel_size=3, stride=1,
padding=1, bias=False), # 112x112
nn.BatchNorm2d(hidden_dim),
nn.ReLU(inplace=True),
nn.Conv2d(hidden_dim, hidden_dim, kernel_size=3, stride=1,
padding=1, bias=False), # 112x112
nn.BatchNorm2d(hidden_dim),
nn.ReLU(inplace=True),
)
self.proj = nn.Conv2d(hidden_dim,
embed_dim,
kernel_size=patch_size // stem_stride,
stride=patch_size // stem_stride)
self.num_patches = (img_size // patch_size) * (img_size // patch_size)
def forward(self, x):
if self.stem_conv:
x = self.conv(x)
x = self.proj(x) # B, C, H, W
return x
不同与ViT使用一层卷积进行嵌入,本文使用四层,前三层提取一定的特征,最后一层将整张feature map分为patch_size个部分,形状变为
在此起着关键的作用,其不但降低了注意力模块所需的计算量,其次,能够在一定程度上起到聚合临近信息的作用,因为的生成是仅仅在通道上使用线性转换,其感受野实际上为,使得感受野大大增加,虽然只是注意中心像素几个邻近像素,但是其在原图上的感受野十分大。
当然,在中也得到了局部邻近信息的聚合。
网络结构

Attention

在中,Q,K,V都是输入本身的线性变换
在中,Q为输入本身的线性变换,而K和V是引入的参数
在中,Q为输入本身,V为输入本身的线性变换,而K是引入的参数
其他
实际上这篇论文与Involution: Inverting the Inherence of Convolution for Visual Recognition十分相似,在Involution一文中,提出了更为广泛的方法,本文可以看作是Involution的一种实例
对于这个情况,作者是如此回应的:

也就是上文所说的的原因
两篇文章的不同之处在于将这种方法视为一种新型的卷积,而本文则是视其为一种注意力模块,实际上二者存在着某些异曲同工之妙,譬如本文中的多头机制则对应着中的分组(并不完全相同)
不同之处又在于,本文学习了的方法,减少了注意力模块中的计算量,并且改善了“卷积核”的生成仅与中心像素有关的情况(或许通过不断学习,卷积核能够建模中心像素与临近像素的关系)。